Trigonometry
The Unit Circle & Special Angles In Trig

Warning
Never use Pi ()! It makes (thinking in terms of) radians confusing, Tao () is what the enlightened trigonometer uses, and won't screw you over.
To easily memorize the special angles in trig, notice the repeating patterns on the above angles.
- For values on the x-axis, anything over and under will be negative
- For values on the y-axis, anything over will be negative
-
Diagonals will be , For ratios of on the sides, i.e.
,
,
,
,
,
,
, and
.
Draw a circle and dot the point where it occurs (which is pretty easy since the above are simple ratios of a circle when expressed in terms of ). Then with regards to the and axis values:
- The longer size will be
- The shorter side will be
Trigonometric Identities
Pythagorean Identities
Sum and Difference Identities
Cofunction Identities
Ratio Identities
Double-Angle Identities
Half-Angle Identities
Power-Reducing Identities
Product-to-Sum Identities
Sum-to-Product-Identities
Trigonometric Equations
Coordinate & Number Systems
Polar Coordinate System
Given
Then
Properties
Given
Then
De Moivre’s Theorem
De Moivre’s Theorem For Finding Roots
Trigonometric form of a complex number
Vectors
Quick Facts
Two vectors are equal if they share the same magnitude and direction.
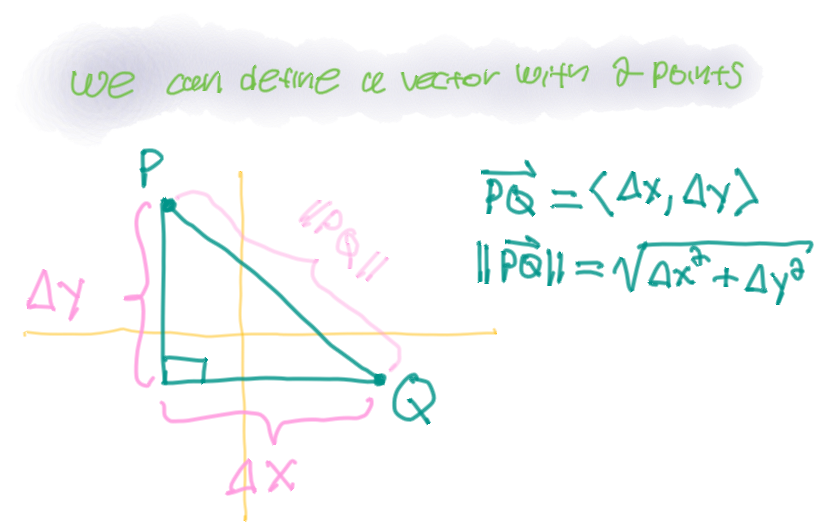
Initial points don't matter. You can define a vector with two points.
Do not divide vectors!
Vector Operations
Dot Product
Cross Product
Length of a Vector
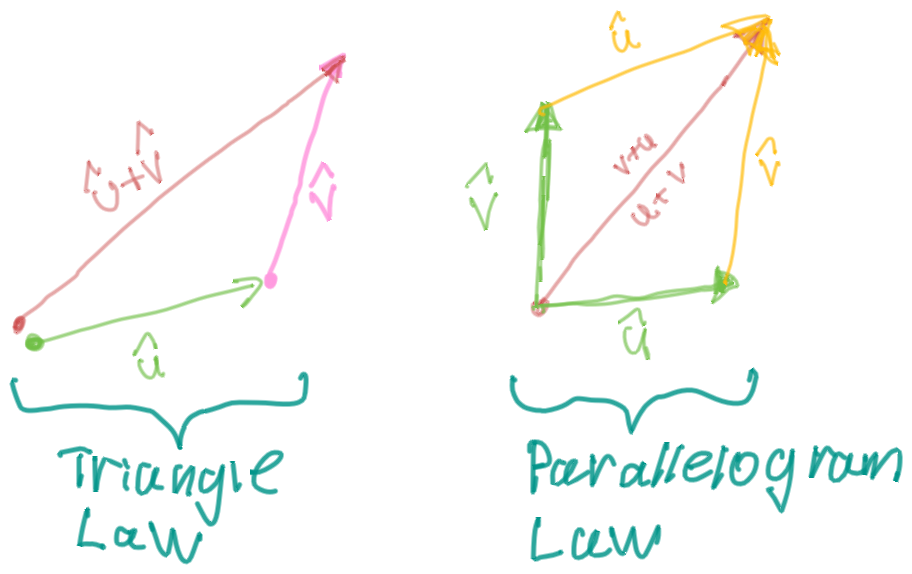
Definition of Vector Addition
If and are positioned so the initial point of is at the terminal point of , then the sum is the vector from the initial point of to the terminal point of .
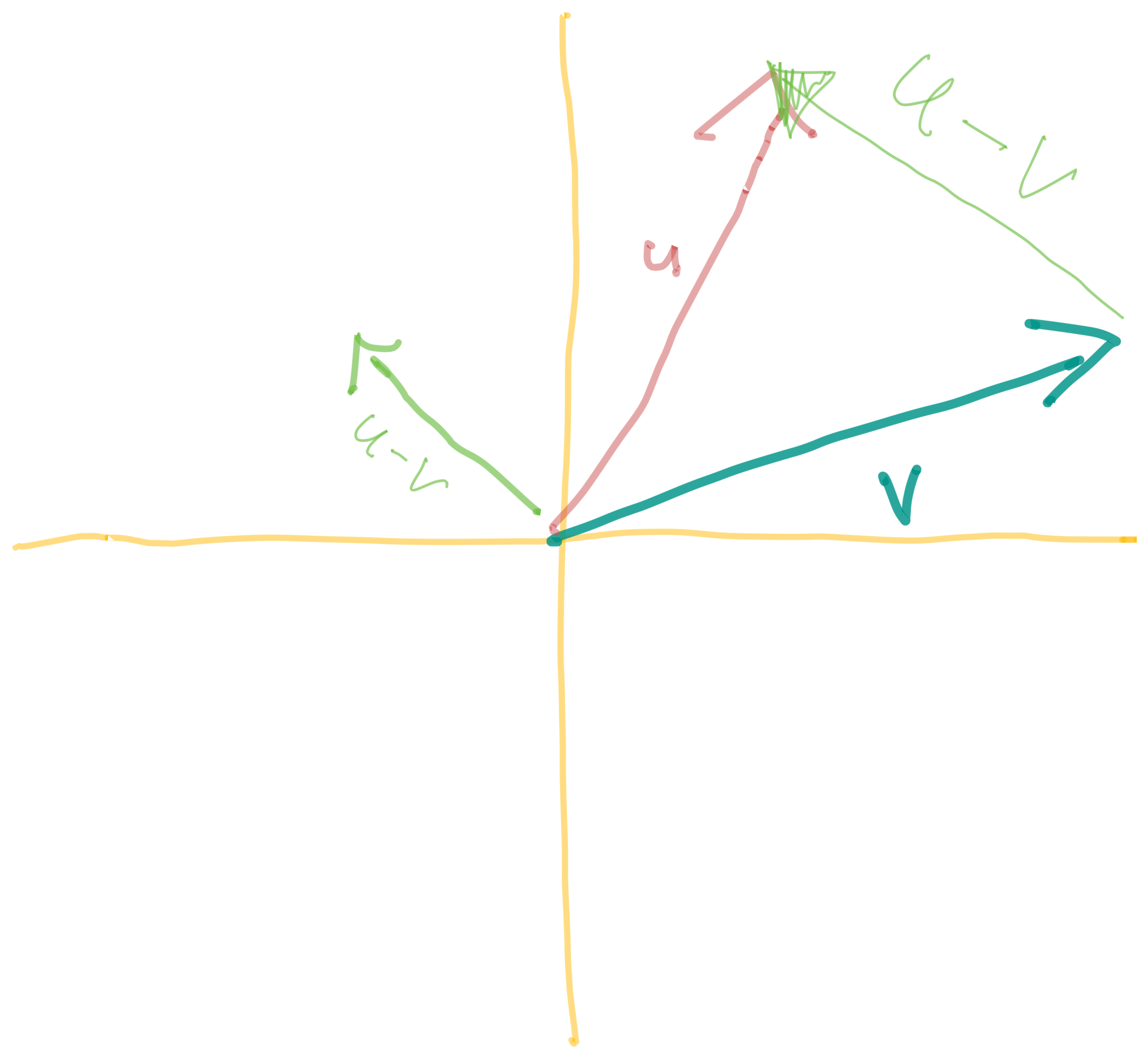
Given some vectors and , the vector is the vector that points from the head of to the head of
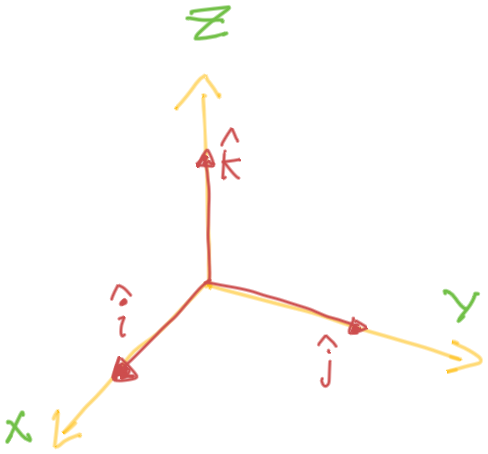
Standard Basis Vectors
Orthogonal
Two vectors are orthogonal if and only if
The Unit Vector
If is the angle between the vectors and , then
If is the angle between the nonzero vectors and , then
Two nonzero vectors and are parallel if and only if
Properties of the Dot Product
Direction Cosines & Direction Angles of a Vector
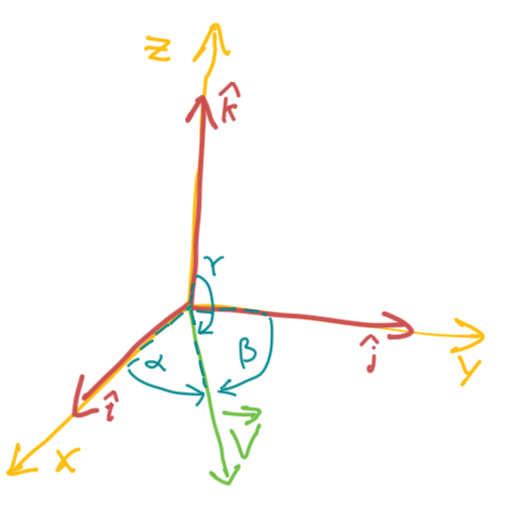
Where
Vector Relations
Parallel Vectors
- When two vectors are parallel; they never intersect (duh).
Given some vectors
The vectors and are parallel if and only if they are scalar multiples of one another.
Alternatively
Orthogonal Vectors
- When two vectors are orthogonal; they meet at right angles.
Given some vectors
Two vectors are orthogonal if and only if
Reparameterization of the position vector in terms of length
- We can parametrize a curve with respect to arc length; because arc length arises naturally from the shape of the curve and does not depend on any coordinate system.
The Arc Length Function
Given
We can redefine in terms of arc length between two endpoints
That is, is the length of the curve () between and .
Furthermore from the adjacent definition; we can simply the above to
The Arc Length Function
That is
Vectors Derived From Some Curve Defined by
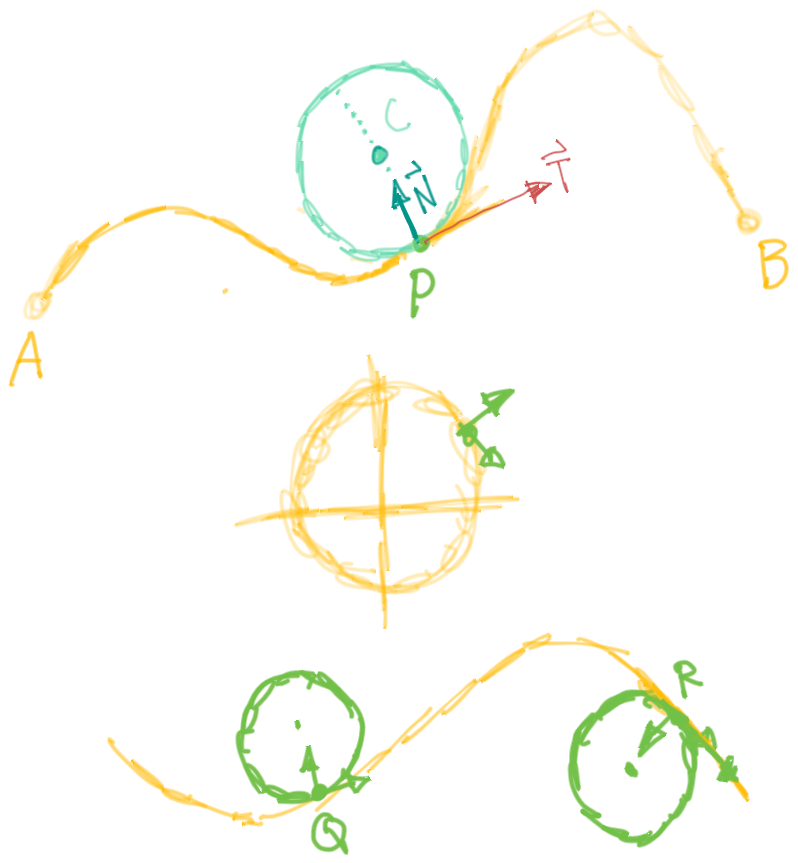
The Unit Tangent Vector
The Unit Normal Vector
The Binormal Vector
- Therefore, the binormal vector is orthogonal to both the tangent vector and the normal vector.
- The plane determined by the normal and binormal vectors N and B at a point P on a curve C is called the normal plane of C at P.
- The plane determined by the vectors T and N is called the osculating plane of C at P. The name comes from the Latin osculum, meaning “kiss.” It is the plane that comes closest to containing the part of the curve near P. (For a plane curve, the osculating plane is simply the plane that contains the curve.)
Kappa - Curvature of a Vector
Tangential & Normal Components of the Acceleration Vector of the Curve
When we study the motion of a particle, it is often useful to resolve the acceleration into two components, one in the direction of the tangent and the other in the direction of the normal.
Specifically
Vector Calculus
The Position Vector
(Original Function)
The Velocity Vector
(First Derivative)
- The velocity vector is also the tangent vector and points in the direction of the tangent line.
- The speed of the particle at time t is the magnitude of the velocity vector, that is,
The Acceleration Vector
(Second Derivative)
Matrices
Reference
The Determinant of A Matrix
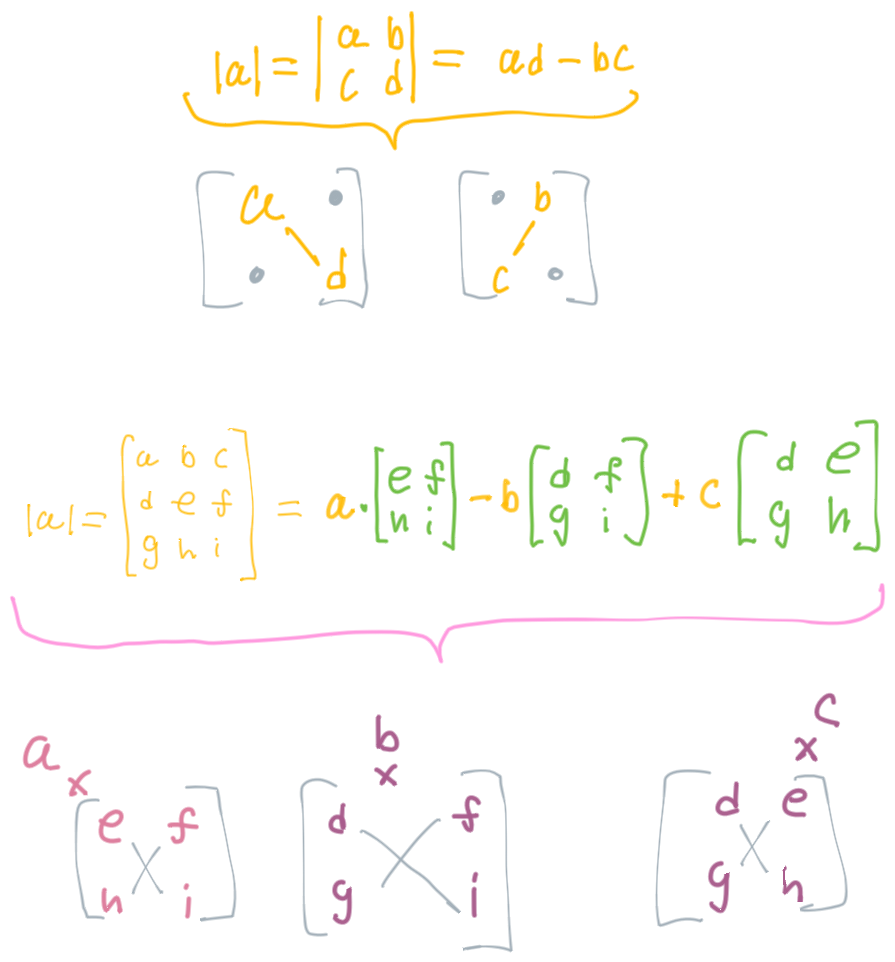
Only works for square matrices.
The Cross Product
Geometry
Definition of a Line
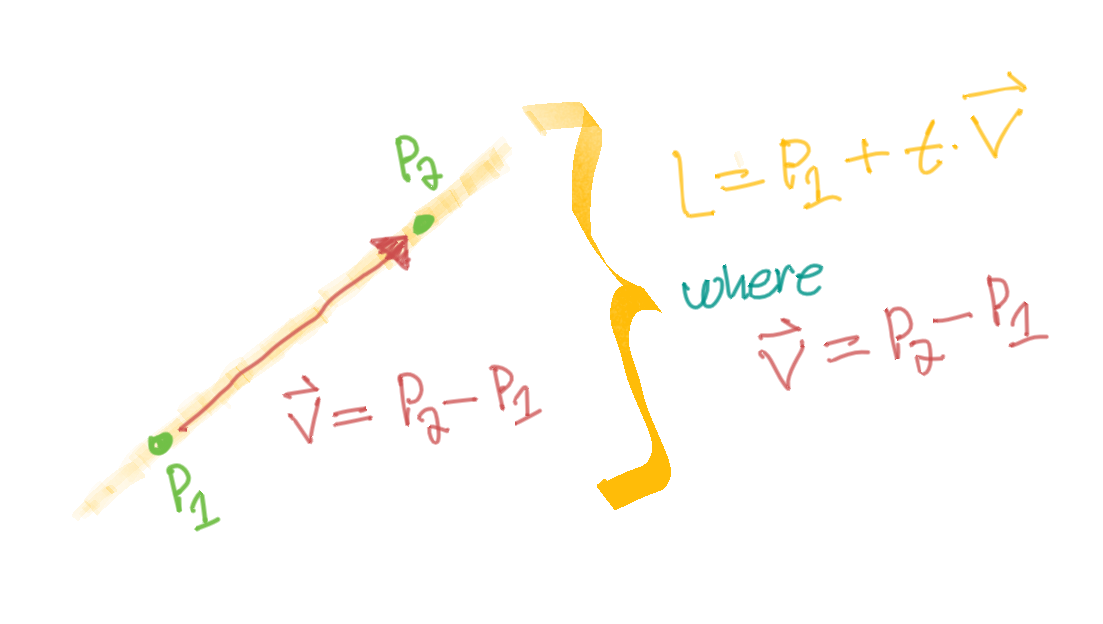
Vector Equation of a Line
Given
We can define a vector between and
Therefore
The equation of a line in 3D space or can be defined VIA the following options
That is
Parametric Equation of a Line
Essentially
That is, is the scaling factor. In a way, it's like it's a function of , but also similar to the slope () in , except (i.e. ) is parameterized.
Sometimes this will be (confusingly) denoted as
Symmetric Equation of a Line
Therefore
Rationale
We rewrite in terms of .
That is
Parameterizations of a curve
- Parametrized curve
- A curve in the plane is said to be parameterized if the set of coordinates on the curve, (x,y), are represented as functions of a variable t.
- A parametrized Curve is a path in the xy-plane traced out by the point as the parameter ranges over an interval .
- A parametrized Curve is a path in the xyz-plane traced out by the point as the parameter ranges over an interval .
Curvature Properties
Length of a Curve
The Arc Length Function
Suppose
- Given some curve defined by some vector in
- where is continuous and is traversed exactly once as increases from to
We can define it's arc length function VIA